Los robots industriales componen una gran gama de tamaños y configuraciones. La configuración hace referencia a la forma física que le ha sido dada a los brazos. Podemos encontrar las siguientes configuraciones.
Robot cartesiano. Este tipo de robot utiliza tres dispositivos deslizantes perpendiculares entre si, para generar movimientos de acuerdo a los tres ejes cartesianos X, Y y Z.

Robot cilíndrico. Se basa en una columna vertical que gira sobre la base. También tiene dos dispositivos deslizantes que pueden generar movimientos sobre los ejes Z e Y.

Robot esférico o polar. Utiliza un brazo telescópico que puede bascular en torno a un eje horizontal. Este eje telescópico está montado sobre una base giratoria. Las articulaciones proporcionan al robot la capacidad de desplazar el brazo en una zona esférica.

Robot de brazo articulado. Se trata de una columna que gira sobre la base. El brazo contiene una articulación, pero sólo puede realizar movimientos en un plano. En el extremo del brazo contiene una eje deslizante que se desplaza en el eje Z. El robot más común de este tipo se conoce como robot SCARA.


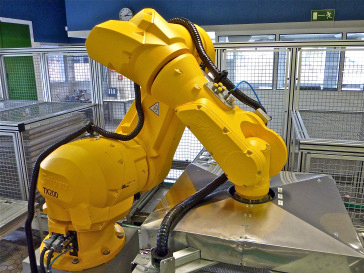
Robot antropomórfico. Está constituido por dos componentes rectos que simulan el brazo o antebrazo humano, sobre una columna giratoria. Estos antebrazos están conectados mediante articulaciones que se asemejan al hombro y al codo.

No hay comentarios:
Publicar un comentario